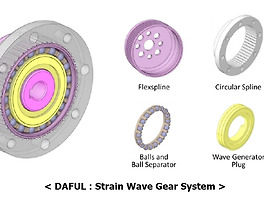
 5. Harmonic Gear Modeler
5-1. 하모닉 기어 모델러가 개발되었습니다. ● 높은 감속, 매우 적은 백래쉬, 높은 정밀도, 적은 부품 개수, 작은 크기의 감속기, 고효율 감속비, 적은 진동 및 소음, 등의 장점으로 인해 고정밀 로봇에 사용되는 하모닉 기어 기능 구현을 전용 모델러를 통해 쉽게 빠르게 할 수 있게 되었습니다.(DAFUL에서는 Strain Wave Gear로 명칭) 5-2. 구동원리는 아래 그림과 같습니다. 5-3 모델링 프로세스는 아래 그림과 같습니다. 5-4 구성 강체/유연체, 연결, 웨이브 제너레이터, 볼 베어링, 시나리오, 등의 정보를 입력하여 하모닉 기어 해석 및 분석을 할 수 있습니다. 5-5 입력 정보 ● Body 5-6 입력 정보 ● Connector 5-7 입력 정보 ● Wave Generator 5-..
5. Harmonic Gear Modeler
5-1. 하모닉 기어 모델러가 개발되었습니다. ● 높은 감속, 매우 적은 백래쉬, 높은 정밀도, 적은 부품 개수, 작은 크기의 감속기, 고효율 감속비, 적은 진동 및 소음, 등의 장점으로 인해 고정밀 로봇에 사용되는 하모닉 기어 기능 구현을 전용 모델러를 통해 쉽게 빠르게 할 수 있게 되었습니다.(DAFUL에서는 Strain Wave Gear로 명칭) 5-2. 구동원리는 아래 그림과 같습니다. 5-3 모델링 프로세스는 아래 그림과 같습니다. 5-4 구성 강체/유연체, 연결, 웨이브 제너레이터, 볼 베어링, 시나리오, 등의 정보를 입력하여 하모닉 기어 해석 및 분석을 할 수 있습니다. 5-5 입력 정보 ● Body 5-6 입력 정보 ● Connector 5-7 입력 정보 ● Wave Generator 5-..
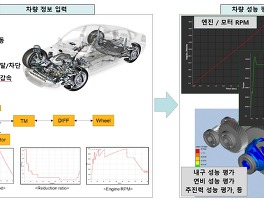 4. 1D Vehicle Simulator
4-1 1D Vehicle Simulator가 개발되었습니다. ● 실차의 동력원 제원, 차량 제원, 구동 조건 & 제동 조건을 입력하여, 주행 및 변속 시 입/출력축에 발생하는 속도 및 부하를 얻을 수 있습니다. 또한, 계산된 부하를 DAFUL/Drivetrain 모델에 적용하여 내구 해석이 가능하게 되었습니 다. 4-2 1D Vehicle Simulator가 개발되었습니다. ● 구동/ 제동, 변속, 차량 제원, 주행 시나리오, 등의 정보를 입력하면 내부 계산식에 의해 속도, 부하, 등의 정보를 출 력하게 됩니다. 4-3 입력 정보 ● 구동/ 제동 4-4 입력 정보 ● 변속 4-5 입력정보 ● 차량 4-6 입력정보 ● 주행 시나리오 4-7 계산식
4. 1D Vehicle Simulator
4-1 1D Vehicle Simulator가 개발되었습니다. ● 실차의 동력원 제원, 차량 제원, 구동 조건 & 제동 조건을 입력하여, 주행 및 변속 시 입/출력축에 발생하는 속도 및 부하를 얻을 수 있습니다. 또한, 계산된 부하를 DAFUL/Drivetrain 모델에 적용하여 내구 해석이 가능하게 되었습니 다. 4-2 1D Vehicle Simulator가 개발되었습니다. ● 구동/ 제동, 변속, 차량 제원, 주행 시나리오, 등의 정보를 입력하면 내부 계산식에 의해 속도, 부하, 등의 정보를 출 력하게 됩니다. 4-3 입력 정보 ● 구동/ 제동 4-4 입력 정보 ● 변속 4-5 입력정보 ● 차량 4-6 입력정보 ● 주행 시나리오 4-7 계산식



